The post Programming #101: The Line Follower Principle appeared first on International Robotics Championship.
]]>Switch Line Follower
The Switch Line Folllower requires the use of loops and switches and wiggles a lot due to sharp turns.

The switch block is used to represent the if/else logic of the algorithm. This is where the decision to do one action or the other action is done. In the case of the line follower, this is where the robot will know if it will turn left or right.
The loop block is used to tell the robot how many times the action will be performed. For the line follower, the switch block is inside the loop block and the robot will perform the color reading according to the number of times indicated in the loop block.

The pseudocode for this kind of follower is as follows:
- Take a new light sensor reading.
- Compare the reading to the set threshold value. To set the robot just at the edge of the line, the threshold value should be set to 50.
- If the condition is true, turn the motor to the right.
- If the condition is false, turn the motor to the left.
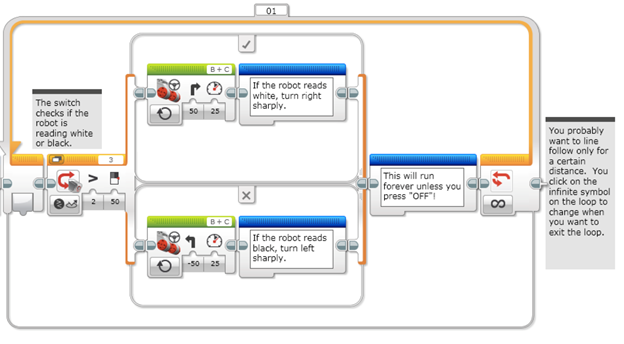
This is a sample program for a switch line follower. The sensor will check if it senses black or white. If it reads white (> 50), the robot will turn right sharply. If it reads black (< 50), the robot will turn left sharply. This action is placed inside a loop and the programmer can dictate how long the robot should perform this action.
Proportional Line Follower
The other line follower to be discussed is the Proportional Line Follower. It is more sophisticated than the switch line follower because it uses Math Blocks and Data Wires. With the use of these blocks, the robot can take readings and do corrections based on the readings.
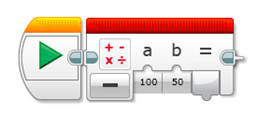
The Math block is used to perform mathematical operations such as addition, subtraction, multiplication and division.
The data wire is used to take an output data from one block and used it as input data in another block.

The pseudocode for the Proportional Line Follower can look like this:
- Reset the Rotation sensor (Only required for line following for a total distance)
- Take a new light sensor reading.
- Compute the error. Distance from line = Light sensor reading – Target reading
- Scale the error to determine a correction amount. Adjust the scaling factor to make the robot follow the line smoothly.
- Use the correction value (from Step 4) to adjust the robot’s turn towards the line.
This is a sample program:

- Step 1 is to reset the rotation sensor.
- Step 2 is when the color sensor will take a light reading and input it into the Math block as variable a.
- Step 3 is when the Math block will compute the error which is a – b. Then the output will be inputted to the next Math block which is Step 4.
- In Step 4, the Math block will multiply the error by a scaling factor or a Constant of Proportionality. This scaling factor is based on the robot design and can be usually determined thru trial and error. The correction will then be inputted to the move steering block to adjust the robot’s turn towards the line.
- Steps 2 – 5 are inside the Loop block and can be performed according to what the programmer needs.
These two Line Followers are the most commonly used. Aside from these two, what other kind of line follower do you know or have you created by yourself?
Sources:
https://ev3lessons.com/en/ProgrammingLessons/advanced/LineFollower.pdf
https://ev3lessons.com/en/ProgrammingLessons/advanced/ProportionalLineFollower.pdf
The post Programming #101: The Line Follower Principle appeared first on International Robotics Championship.
]]>The post Calculating Velocity of Lego EV3 Large Motor in a Projectile Motion appeared first on International Robotics Championship.
]]>The EV3 Large Servo Motor is a powerful motor that uses tacho feedback for precise control to within one degree of accuracy.
By using the built-in rotation sensor, the intelligent motor can be made to align with other motors on the robot so that it can drive in a straight line at the same speed. It can also be used to give an accurate reading for experiments.
The motor case design also makes it easy to assemble gear trains.

Specifications:
- Tacho feedback to one degree of accuracy;
- 160-170 rpm;
- Running torque of 20 N/cm (approximately 30 oz/in.);
- Stall torque of 40 N/cm (approximately 60 oz/in.);
- Auto-ID is built into the EV3 Software.
Combining knowledge from projectile and getting the velocity of the rotating body such as EV3 large motor can lessen your trial and error with your robot.
Using the formula of V = 2 .rN or
DN
- V – velocity of the body rotating m/s
- r – radius of rotation
- D – diameter of rotation
- N – no. of rotation/revolution per minute
Sample
A 50g Blue ball will be thrown in a plain field with an angle of 45 degrees. Using the large motor with a 170rpm (max) how far will it go if the throwing arm has a length of 100mm.
Using the formula above in getting the initial velocity that will be applied to the Ball
V = 2 (3.14)*(0.1m)(170rev/min)
V = 106.8 m/min
V= 1.78 m/s
Using this V as the initial velocity of the object in projectile motion, we can get the maximum distance it can reach using the formula
R = V2 x sin2(Ø) / g
R = (1.78m/s)2 x sin2(45)/9.81m/s2
R = 0.507m
Note that If we decrease the value of rotation of the large motor, we also decrease the peripheral velocity of the object and shorten the distance it will travel.
The post Calculating Velocity of Lego EV3 Large Motor in a Projectile Motion appeared first on International Robotics Championship.
]]>The post What is A Catapult and How Does It Work? appeared first on International Robotics Championship.
]]>A catapult is a ballistic device used to launch a projectile a great distance without the aid of gunpowder or other propellants.
A catapult uses the sudden release of stored potential energy to propel its payload.

Parts of a Catapult
- Bucket – a container use to hold the payload prior to release;
- Payload – the object that will be discharge in projectile motion;
- Arm – holds the Bucket that has a pivot connection at the base;
- Base and Frame – Supports the Catapult’s weight and action;
- Rope – stores potential energy by stretching or winding up while it is attached directly or indirectly to the arm;
- Restraining Rope – it serves as the trigger of the catapult once release;
- Counterweight – used in other type of catapult. Stores potential energy by setting it in a higher elevation and drop it once the restraining rope is released.
Energies involved in the catapult’s mechanism
There are three primary energy storage mechanism used in a catapult.
- Tension – is built by stretching the rope up to the maximum limit. When it is stretched, the potential energy stores in the rope, parallel to the direction of how it is stretched.
- Torsion -is built in the pivot point of the arm. the more you twist the rope, the greater energy you stored tangent to the center of rotation.
- Gravity – counterweight is one type of storing the potential energy by pulling a heavy object against the gravitational force.
Once the Payload is released in the Catapult, it will create a projectile motion towards the direction it is positioned.
Effect of Velocity in a Projectile Motion
Velocity is the distance travelled of an object over time. In a projectile motion, it affects the distance travelled of an object. The higher the velocity, the farther it can reach at the same angle.
To show you the effect, in image 2, we have a cannonball weighing 20kg that is shot at an angle of 45 degrees.


Effect of Angle in a Projectile Motion
Angle affects how far and how high the object will go in a projectile motion.
Using the simplified formula: R = (Vo2sin2Ø)/g
- R – Range
- Vo – Initial Velocity of the Object
- Ø – Angle of discharge in a projectile motion
- G – Gravitational force
We can compute for the maximum distance traveled.
Here are the samples images with same object and initial velocity but differs in the angle.


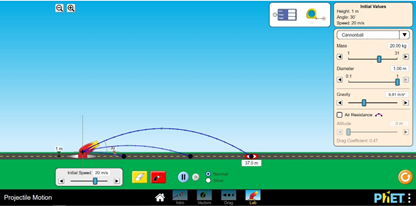
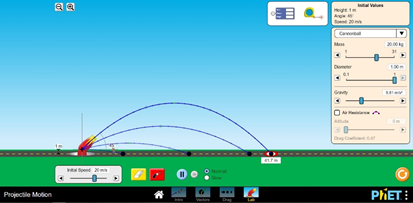
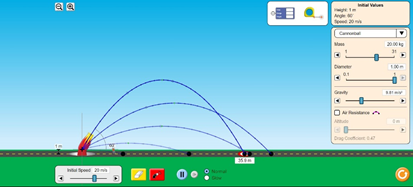
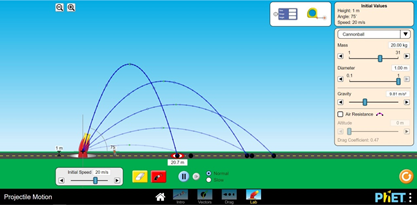

Do you see the changes in distance and height travelled by the cannonball at different angles?
At 45 Degrees, the vertical and horizontal forces are equal giving the cannonball the farthest distance it can reach at a given velocity and gravitational force.
While at 90 degrees, the cannonball can attain the maximum elevation it can reach at a same velocity and gravitational force
Effect of Gravity in a Projectile Motion
Every planet has its own gravitational pull. Here on earth, our gravitational pull is 9.807m/s2, while on the moon it is 1.62m/s2. This force is pulling the object towards the center of the planet. In a projectile motion, it affects the time an object will hit the ground, the distance it will travel, and the maximum height it can achieve.
In image No. 9, it shows changing the value of gravity in a 20kg cannonball that fires at 20m/s velocity at 45-degree angle.


The lower the gravitational pull, the farther the object can travel at a given instance.
You may also check https://phet.colorado.edu/sims/html/projectile-motion/latest/projectile-motion_en.html for you to explore more about projectile motion by varying the gravitational force and including Air resistance of the object.
The post What is A Catapult and How Does It Work? appeared first on International Robotics Championship.
]]>The post Physics #101: The Forces Implied in Kicking appeared first on International Robotics Championship.
]]>So what is the science, or more specifically the physics, behind soccer? You will find that forces is one of the principles that you have probably learned from school by now. But just to recap:
- Force – a push or a pull, acting on an object as a result of its interaction with another object. It is a vector quantity which means that it has both magnitude and direction. There are two broad categories of forces: contact force and action-at-a-distance force.
Contact force is the type that result when two interacting objects are perceived to be physically contacting with each other. Examples are the following: Frictional force, Tensional force, Normal force, Air resistance force and Applied forces.
- Frictional force – The force exerted by a surface as an object moves across it or makes an effort to move across it.
- Tensional force – the force that is transmitted through a string, rope, cable or wire when it is pulled tight by forces acting from opposite ends.
- Normal force – the support force exerted upon an object that is in contact with another stable object
- Air resistance force – a special type of frictional force that acts upon objects as they travel through the air.
- Applied force – force that is applied to an object by a person or another object.
Action-at-a-distance force, on the other hand, are those types of forces that result even when the two interacting objects are not in physical contact with each other, yet are able to exert a push or pull despite their physical separation. Examples are Gravitational force, Electrical force and Magnetic force.
- Gravitational force – the force with which the earth, moon, or other massively large object attracts another object towards itself.
- Electrical force – the repulsive or attractive interaction between any two charged bodies
- Magnetic force – attraction or repulsion that arises between electrically charged particles because of their motion.
Now, let’s see what forces are applied on soccer ball.


When the soccer ball is at rest, the only forces acting upon it are the gravitational force and normal force which are equal and opposite in direction. Since the forces are balanced, the object remains at rest.
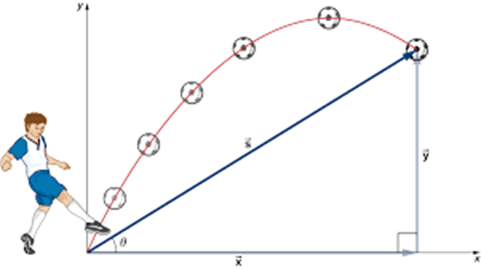
Following the Newton’s First Law of Motion, the Law of Inertia, the object will stay at rest or uniform in motion unless acted upon by an unbalanced force. In other words, to make the ball move initially, an applied force which is the kick should be applied. How hard the person kicks the ball will dictate the initial velocity and the angle of the trajectory (curved path).
Now, all this is explained in the situation in which we have gravity. In the first mission though, things are a bit different: the gravitational force is missing! Complete the first mission of Stage 1 and, based on your experience, try to write down how does an object behave when kicked in an environment where there is no gravity.
Source: https://www.physicsclassroom.com
The post Physics #101: The Forces Implied in Kicking appeared first on International Robotics Championship.
]]>